
Преглед изворни кода
Merged from git.drogon.net, SPI driver helpers, C++ wrappers, softPwm, piNes, gertboard, SPI
pull/1/head Gordon Henderson
пре 12 година
Gordon Henderson
пре 12 година
committed by
 Philip Howard
Philip Howard
Philip Howard
22 измењених фајлова са 1703 додато и 274 уклоњено
Подељен поглед
Diff Options
-
+21 -4examples/Makefile
-
+68 -0examples/delayTest.c
-
+77 -0examples/gertboard.c
-
BINexamples/gertboard.png
-
+44 -0examples/nes.c
-
+69 -0examples/softPwm.c
-
+1 -1gpio/Makefile
-
+83 -19gpio/gpio.1
-
+360 -90gpio/gpio.c
-
+122 -0wiringPi/gertboard.c
-
+39 -0wiringPi/gertboard.h
-
+8 -0wiringPi/lcd.h
-
+113 -0wiringPi/piNes.c
-
+45 -0wiringPi/piNes.h
-
+130 -0wiringPi/softPwm.c
-
+34 -0wiringPi/softPwm.h
-
+296 -135wiringPi/wiringPi.c
-
+15 -6wiringPi/wiringPi.h
-
+117 -0wiringPi/wiringPiSPI.c
-
+35 -0wiringPi/wiringPiSPI.h
-
+25 -19wiringPi/wiringSerial.c
-
+1 -0wiringPi/wiringSerial.h
+ 21
- 4
examples/Makefile
Прегледај датотеку
| @@ -35,11 +35,11 @@ LIBS = -lwiringPi | |||
| # Should not alter anything below this line | |||
| ############################################################################### | |||
| SRC = test1.c test2.c speed.c lcd.c wfi.c piface.c | |||
| SRC = test1.c test2.c speed.c lcd.c wfi.c piface.c gertboard.c nes.c delayTest.c softPwm.c | |||
| OBJ = test1.o test2.o speed.o lcd.o wfi.o piface.o | |||
| OBJ = test1.o test2.o speed.o lcd.o wfi.o piface.o gertboard.o nes.o delayTest.o softPwm.o | |||
| all: test1 test2 speed lcd wfi piface | |||
| all: test1 test2 speed lcd wfi piface gertboard nes softPwm | |||
| test1: test1.o | |||
| @echo [link] | |||
| @@ -65,13 +65,30 @@ piface: piface.o | |||
| @echo [link] | |||
| $(CC) -o $@ piface.o $(LDFLAGS) $(LIBS) -lpthread | |||
| gertboard: gertboard.o | |||
| @echo [link] | |||
| $(CC) -o $@ gertboard.o $(LDFLAGS) $(LIBS) -lm | |||
| nes: nes.o | |||
| @echo [link] | |||
| $(CC) -o $@ nes.o $(LDFLAGS) $(LIBS) -lm | |||
| softPwm: softPwm.o | |||
| @echo [link] | |||
| $(CC) -o $@ softPwm.o $(LDFLAGS) $(LIBS) -lm -lpthread | |||
| delayTest: delayTest.o | |||
| @echo [link] | |||
| $(CC) -o $@ delayTest.o $(LDFLAGS) $(LIBS) | |||
| .c.o: | |||
| @echo [CC] $< | |||
| @$(CC) -c $(CFLAGS) $< -o $@ | |||
| clean: | |||
| rm -f $(OBJ) *~ core tags test1 test2 speed lcd wfi piface | |||
| rm -f $(OBJ) *~ core tags test1 test2 speed lcd wfi piface gertboard nes delayTest softPwm | |||
| tags: $(SRC) | |||
| @echo [ctags] | |||
+ 68
- 0
examples/delayTest.c
Прегледај датотеку
| @@ -0,0 +1,68 @@ | |||
| #include <stdio.h> | |||
| #include <unistd.h> | |||
| #include <wiringPi.h> | |||
| #include <time.h> | |||
| #include <sys/types.h> | |||
| #include <sys/time.h> | |||
| #define CYCLES 1000 | |||
| #define DELAY 99 | |||
| int main() | |||
| { | |||
| int x ; | |||
| struct timeval t1, t2 ; | |||
| long long t ; | |||
| unsigned int max, min ; | |||
| unsigned int values [CYCLES] ; | |||
| max = 0 ; | |||
| min = 1000000 ; | |||
| if (wiringPiSetup () == -1) | |||
| return 1 ; | |||
| piHiPri (10) ; | |||
| sleep (1) ; | |||
| // Baseline test | |||
| gettimeofday (&t1, NULL) ; | |||
| gettimeofday (&t2, NULL) ; | |||
| t = t2.tv_usec - t1.tv_usec ; | |||
| printf ("Baseline test: %lld\n", t); | |||
| for (x = 0 ; x < CYCLES ; ++x) | |||
| { | |||
| gettimeofday (&t1, NULL) ; | |||
| delayMicroseconds (DELAY) ; | |||
| gettimeofday (&t2, NULL) ; | |||
| t = t2.tv_usec - t1.tv_usec ; | |||
| if (t > max) max = t ; | |||
| if (t < min) min = t ; | |||
| values [x] = t ; | |||
| } | |||
| printf ("Done: Max: %d, min: %d\n", max, min) ; | |||
| for (x = 0 ; x < CYCLES ; ++x) | |||
| { | |||
| printf ("%4d", values [x]) ; | |||
| if (values [x] > DELAY) | |||
| printf (".") ; | |||
| else if (values [x] < DELAY) | |||
| printf ("-") ; | |||
| else | |||
| printf (" ") ; | |||
| if (((x + 1) % 20) == 0) | |||
| printf ("\n") ; | |||
| } | |||
| printf ("\n") ; | |||
| return 0 ; | |||
| } | |||
+ 77
- 0
examples/gertboard.c
Прегледај датотеку
| @@ -0,0 +1,77 @@ | |||
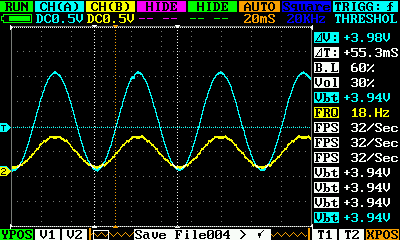
| /* | |||
| * gertboard.c: | |||
| * Simple test for the SPI bus on the Gertboard | |||
| * | |||
| * Hardware setup: | |||
| * D/A port 0 jumpered to A/D port 0. | |||
| * | |||
| * We output a sine wave on D/A port 0 and sample A/D port 0. We then | |||
| * copy this value to D/A port 1 and use a 'scope on both D/A ports | |||
| * to check all's well. | |||
| * | |||
| */ | |||
| #include <stdio.h> | |||
| #include <stdint.h> | |||
| #include <math.h> | |||
| #define B_SIZE 200 | |||
| #undef DO_TIMING | |||
| #include <wiringPi.h> | |||
| #include <gertboard.h> | |||
| int main (void) | |||
| { | |||
| double angle ; | |||
| int i ; | |||
| uint32_t x1 ; | |||
| int buffer [B_SIZE] ; | |||
| #ifdef DO_TIMING | |||
| unsigned int now, then ; | |||
| #endif | |||
| printf ("Raspberry Pi Gertboard SPI test program\n") ; | |||
| if (wiringPiSetupSys () < 0) | |||
| return -1 ; | |||
| if (gertboardSPISetup () < 0) | |||
| return 1 ; | |||
| // Generate a Sine Wave | |||
| for (i = 0 ; i < B_SIZE ; ++i) | |||
| { | |||
| angle = ((double)i / (double)B_SIZE) * M_PI * 2.0 ; | |||
| buffer [i] = (int)rint ((sin (angle)) * 127.0 + 128.0) ; | |||
| } | |||
| for (;;) | |||
| { | |||
| #ifdef DO_TIMING | |||
| then = millis () ; | |||
| #endif | |||
| for (i = 0 ; i < B_SIZE ; ++i) | |||
| { | |||
| gertboardAnalogWrite (0, buffer [i]) ; | |||
| #ifndef DO_TIMING | |||
| x1 = gertboardAnalogRead (0) ; | |||
| gertboardAnalogWrite (1, x1 >> 2) ; // 10-bit A/D, 8-bit D/A | |||
| #endif | |||
| } | |||
| #ifdef DO_TIMING | |||
| now = millis () ; | |||
| printf ("%4d mS, %9.7f S/sample", now - then, ((double)(now - then) / 1000.0) / (double)B_SIZE) ; | |||
| printf (" -> %9.4f samples/sec \n", 1 / (((double)(now - then) / 1000.0) / (double)B_SIZE)) ; | |||
| #endif | |||
| } | |||
| return 0 ; | |||
| } | |||
BIN
examples/gertboard.png
Прегледај датотеку
{kind=link}
| Before | After |
|---|---|
|
|
| Width: 400 | Height: 240 | Size: 4.7 KiB |
+ 44
- 0
examples/nes.c
Прегледај датотеку
| @@ -0,0 +1,44 @@ | |||
| #include <stdio.h> | |||
| #include <errno.h> | |||
| #include <string.h> | |||
| #include <wiringPi.h> | |||
| #include <piNes.h> | |||
| #define BLANK "| " | |||
| int main () | |||
| { | |||
| int joystick ; | |||
| unsigned int buttons ; | |||
| if (wiringPiSetup () == -1) | |||
| { | |||
| fprintf (stdout, "oops: %s\n", strerror (errno)) ; | |||
| return 1 ; | |||
| } | |||
| if ((joystick = setupNesJoystick (2, 1, 0)) == -1) | |||
| { | |||
| fprintf (stdout, "Unable to setup joystick\n") ; | |||
| return 1 ; | |||
| } | |||
| for (;;) | |||
| { | |||
| buttons = readNesJoystick (joystick) ; | |||
| if ((buttons & NES_UP) != 0) printf ("| UP " ) ; else printf (BLANK) ; | |||
| if ((buttons & NES_DOWN) != 0) printf ("| DOWN " ) ; else printf (BLANK) ; | |||
| if ((buttons & NES_LEFT) != 0) printf ("| LEFT " ) ; else printf (BLANK) ; | |||
| if ((buttons & NES_RIGHT) != 0) printf ("|RIGHT " ) ; else printf (BLANK) ; | |||
| if ((buttons & NES_SELECT) != 0) printf ("|SELECT" ) ; else printf (BLANK) ; | |||
| if ((buttons & NES_START) != 0) printf ("|START " ) ; else printf (BLANK) ; | |||
| if ((buttons & NES_A) != 0) printf ("| A " ) ; else printf (BLANK) ; | |||
| if ((buttons & NES_B) != 0) printf ("| B " ) ; else printf (BLANK) ; | |||
| printf ("|\n") ; | |||
| } | |||
| return 0 ; | |||
| } | |||
+ 69
- 0
examples/softPwm.c
Прегледај датотеку
| @@ -0,0 +1,69 @@ | |||
| #include <stdio.h> | |||
| #include <errno.h> | |||
| #include <string.h> | |||
| #include <wiringPi.h> | |||
| #include <softPwm.h> | |||
| #define RANGE 100 | |||
| #define NUM_LEDS 12 | |||
| int ledMap [NUM_LEDS] = { 0, 1, 2, 3, 4, 5, 6, 7, 10, 11, 12, 13 } ; | |||
| int values [NUM_LEDS] = { 0, 17, 32, 50, 67, 85, 100, 85, 67, 50, 32, 17 } ; | |||
| int main () | |||
| { | |||
| int i, j ; | |||
| char buf [80] ; | |||
| if (wiringPiSetup () == -1) | |||
| { | |||
| fprintf (stdout, "oops: %s\n", strerror (errno)) ; | |||
| return 1 ; | |||
| } | |||
| for (i = 0 ; i < NUM_LEDS ; ++i) | |||
| { | |||
| softPwmCreate (ledMap [i], 0, RANGE) ; | |||
| printf ("%3d, %3d, %3d\n", i, ledMap [i], values [i]) ; | |||
| } | |||
| fgets (buf, 80, stdin) ; | |||
| // Bring all up one by one: | |||
| for (i = 0 ; i < NUM_LEDS ; ++i) | |||
| for (j = 0 ; j <= 100 ; ++j) | |||
| { | |||
| softPwmWrite (ledMap [i], j) ; | |||
| delay (10) ; | |||
| } | |||
| fgets (buf, 80, stdin) ; | |||
| // Down fast | |||
| for (i = 100 ; i > 0 ; --i) | |||
| { | |||
| for (j = 0 ; j < NUM_LEDS ; ++j) | |||
| softPwmWrite (ledMap [j], i) ; | |||
| delay (10) ; | |||
| } | |||
| fgets (buf, 80, stdin) ; | |||
| for (;;) | |||
| { | |||
| for (i = 0 ; i < NUM_LEDS ; ++i) | |||
| softPwmWrite (ledMap [i], values [i]) ; | |||
| delay (50) ; | |||
| i = values [0] ; | |||
| for (j = 0 ; j < NUM_LEDS - 1 ; ++j) | |||
| values [j] = values [j + 1] ; | |||
| values [NUM_LEDS - 1] = i ; | |||
| } | |||
| } | |||
+ 1
- 1
gpio/Makefile
Прегледај датотеку
| @@ -41,7 +41,7 @@ OBJ = gpio.o | |||
| all: gpio | |||
| gpio: gpio.o | |||
| gpio: gpio.o /usr/local/lib/libwiringPi.a | |||
| @echo [LD] | |||
| @$(CC) -o $@ gpio.o $(LDFLAGS) $(LIBS) | |||
+ 83
- 19
gpio/gpio.1
Прегледај датотеку
| @@ -4,28 +4,55 @@ | |||
| gpio \- Command-line access to Raspberry Pi and PiFace GPIO | |||
| .SH SYNOPSIS | |||
| .TP | |||
| .B gpio | |||
| .RB [ \-v ] | |||
| .TP | |||
| .B \-v | |||
| .PP | |||
| .B gpio | |||
| .RB [ \-g ] | |||
| .RB < read/write/pwm/mode ...> | |||
| .TP | |||
| .B [ \-g ] | |||
| .B read/write/pwm/mode ... | |||
| .PP | |||
| .B gpio | |||
| .RB [ \-p ] | |||
| .RB < read/write/mode ...> | |||
| .TP | |||
| .B [ \-p ] | |||
| .B read/write/mode | |||
| .B ... | |||
| .PP | |||
| .B gpio | |||
| .B unexportall/exports | |||
| .PP | |||
| .B gpio | |||
| .B export/edge/unexport | |||
| .B ... | |||
| .PP | |||
| .B gpio | |||
| .RB < export/edge/unexport/unexportall/exports ...> | |||
| .B drive | |||
| group value | |||
| .PP | |||
| .B gpio | |||
| .B pwm-bal/pwm-ms | |||
| .PP | |||
| .B gpio | |||
| .B pwmr | |||
| range | |||
| .PP | |||
| .B gpio | |||
| .B load \ i2c/spi | |||
| .PP | |||
| .B gpio | |||
| .B gbr | |||
| channel | |||
| .PP | |||
| .B gpio | |||
| .B gbw | |||
| channel value | |||
| .SH DESCRIPTION | |||
| .B GPIO | |||
| is a command line tool to allow the user easy access to the GPIO pins | |||
| on the Raspberry Pi. It's designed for simple testing and diagnostic | |||
| purposes, but can be used in shell scripts for general if somewhat slow | |||
| control of the GPIO pins. | |||
| is a swiss army knofe of a command line tool to allow the user easy | |||
| access to the GPIO pins on the Raspberry Pi and the SPI A/D and D/A | |||
| convertors on the Gertboard. It's designed for simple testing and | |||
| diagnostic purposes, but can be used in shell scripts for general if | |||
| somewhat slow control of the GPIO pins. | |||
| Additionally, it can be used to set the exports in the \fI/sys/class/gpio\fR | |||
| system directory to allow subsequent programs to use the \fR/sys/class/gpio\fR | |||
| @@ -65,6 +92,14 @@ use the literals \fIup\fR, \fIdown\fR or \fItri\fR to set the internal | |||
| pull-up, pull-down or tristate (off) controls. | |||
| .TP | |||
| .B unexportall | |||
| Un-Export all the GPIO pins in the /sys/class/gpio directory. | |||
| .TP | |||
| .B exports | |||
| Print a list (if any) of all the exported GPIO pins and their current values. | |||
| .TP | |||
| .B export | |||
| Export a GPIO pin in the \fI/sys/class/gpio\fR directory. Use like the | |||
| mode command above however only \fIin\fR and \fIout\fR are supported at | |||
| @@ -96,12 +131,41 @@ requiring root/sudo. | |||
| Un-Export a GPIO pin in the /sys/class/gpio directory. | |||
| .TP | |||
| .B unexportall | |||
| Un-Export all the GPIO pins in the /sys/class/gpio directory. | |||
| .B drive | |||
| group value | |||
| Change the pad driver value for the given pad group to the supplied drive | |||
| value. Group is 0, 1 or 2 and value is 0-7. Do not use unless you are | |||
| absolutely sure you know what you're doing. | |||
| .TP | |||
| .B exports | |||
| Print a list (if any) of all the exported GPIO pins and their current values. | |||
| .B pwm-bal/pwm-ms | |||
| Change the PWM mode to balanced (the default) or mark:space ratio (traditional) | |||
| .TP | |||
| .B pwmr | |||
| Change the PWM range register. The default is 1024. | |||
| .TP | |||
| .B load i2c/spi | |||
| This loads the i2c or the spi drivers into the system and changes the permissions on | |||
| the associated /dev/ entries so that the current user has access to them. | |||
| .TP | |||
| .B gbr | |||
| channel | |||
| This reads the analog to digital convertor on the Gertboard on the given | |||
| channel. The board jumpers need to be in-place to do this operation. | |||
| .TP | |||
| .B gbw | |||
| channel value | |||
| This writes the supplied value to the output channel on the Gertboards | |||
| SPI digital to analogue convertor. | |||
| The board jumpers need to be in-place to do this operation. | |||
| .SH "WiringPi vs. GPIO Pin numbering" | |||
| @@ -170,7 +234,7 @@ Gordon Henderson | |||
| .SH "REPORTING BUGS" | |||
| Report bugs to <gordon@drogon.net> | |||
| Report bugs to <projects@drogon.net> | |||
| .SH COPYRIGHT | |||
+ 360
- 90
gpio/gpio.c
Прегледај датотеку
| @@ -1,6 +1,7 @@ | |||
| /* | |||
| * gpio.c: | |||
| * Set-UID command-line interface to the Raspberry Pi's GPIO | |||
| * Swiss-Army-Knife, Set-UID command-line interface to the Raspberry | |||
| * Pi's GPIO. | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| @@ -21,7 +22,6 @@ | |||
| *********************************************************************** | |||
| */ | |||
| #include <wiringPi.h> | |||
| #include <stdio.h> | |||
| #include <stdlib.h> | |||
| @@ -32,15 +32,144 @@ | |||
| #include <sys/types.h> | |||
| #include <fcntl.h> | |||
| #include <wiringPi.h> | |||
| #include <gertboard.h> | |||
| #ifndef TRUE | |||
| # define TRUE (1==1) | |||
| # define FALSE (1==2) | |||
| #endif | |||
| #define VERSION "1.0" | |||
| #define VERSION "1.2" | |||
| static int wpMode ; | |||
| char *usage = "Usage: gpio -v\n" | |||
| " gpio -h\n" | |||
| " gpio [-g] <read/write/pwm/mode> ...\n" | |||
| " gpio [-p] <read/write/mode> ...\n" | |||
| " gpio <export/edge/unexport/unexportall/exports> ..." ; | |||
| " gpio export/edge/unexport/unexportall/exports ...\n" | |||
| " gpio drive <group> <value>\n" | |||
| " gpio pwm-bal/pwm-ms \n" | |||
| " gpio pwmr <range> \n" | |||
| " gpio load spi/i2c\n" | |||
| " gpio gbr <channel>\n" | |||
| " gpio gbw <channel> <value>\n" ; | |||
| /* | |||
| * changeOwner: | |||
| * Change the ownership of the file to the real userId of the calling | |||
| * program so we can access it. | |||
| ********************************************************************************* | |||
| */ | |||
| static void changeOwner (char *cmd, char *file) | |||
| { | |||
| uid_t uid = getuid () ; | |||
| uid_t gid = getgid () ; | |||
| if (chown (file, uid, gid) != 0) | |||
| { | |||
| if (errno == ENOENT) // Warn that it's not there | |||
| fprintf (stderr, "%s: Warning: File not present: %s\n", cmd, file) ; | |||
| else | |||
| { | |||
| fprintf (stderr, "%s: Unable to change ownership of %s: %s\n", cmd, file, strerror (errno)) ; | |||
| exit (1) ; | |||
| } | |||
| } | |||
| } | |||
| /* | |||
| * moduleLoaded: | |||
| * Return true/false if the supplied module is loaded | |||
| ********************************************************************************* | |||
| */ | |||
| static int moduleLoaded (char *modName) | |||
| { | |||
| int len = strlen (modName) ; | |||
| int found = FALSE ; | |||
| FILE *fd = fopen ("/proc/modules", "r") ; | |||
| char line [80] ; | |||
| if (fd == NULL) | |||
| { | |||
| fprintf (stderr, "gpio: Unable to check modules: %s\n", strerror (errno)) ; | |||
| exit (1) ; | |||
| } | |||
| while (fgets (line, 80, fd) != NULL) | |||
| { | |||
| if (strncmp (line, modName, len) != 0) | |||
| continue ; | |||
| found = TRUE ; | |||
| break ; | |||
| } | |||
| fclose (fd) ; | |||
| return found ; | |||
| } | |||
| /* | |||
| * doLoad: | |||
| * Load either the spi or i2c modules and change device ownerships, etc. | |||
| ********************************************************************************* | |||
| */ | |||
| static void _doLoadUsage (char *argv []) | |||
| { | |||
| fprintf (stderr, "Usage: %s load <spi/i2c>\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| static void doLoad (int argc, char *argv []) | |||
| { | |||
| char *module ; | |||
| char cmd [80] ; | |||
| char *file1, *file2 ; | |||
| if (argc != 3) | |||
| _doLoadUsage (argv) ; | |||
| /**/ if (strcasecmp (argv [2], "spi") == 0) | |||
| { | |||
| module = "spi_bcm2708" ; | |||
| file1 = "/dev/spidev0.0" ; | |||
| file2 = "/dev/spidev0.1" ; | |||
| } | |||
| else if (strcasecmp (argv [2], "i2c") == 0) | |||
| { | |||
| module = "i2c_bcm2708" ; | |||
| file1 = "/dev/i2c-0" ; | |||
| file2 = "/dev/i2c-1" ; | |||
| } | |||
| else | |||
| _doLoadUsage (argv) ; | |||
| if (!moduleLoaded (module)) | |||
| { | |||
| sprintf (cmd, "modprobe %s", module) ; | |||
| system (cmd) ; | |||
| } | |||
| if (!moduleLoaded (module)) | |||
| { | |||
| fprintf (stderr, "%s: Unable to load %s\n", argv [0], module) ; | |||
| exit (1) ; | |||
| } | |||
| sleep (1) ; // To let things get settled | |||
| changeOwner (argv [0], file1) ; | |||
| changeOwner (argv [0], file2) ; | |||
| } | |||
| /* | |||
| @@ -49,7 +178,7 @@ char *usage = "Usage: gpio -v\n" | |||
| ********************************************************************************* | |||
| */ | |||
| void doExports (void) | |||
| static void doExports (int argc, char *argv []) | |||
| { | |||
| int fd ; | |||
| int i, l, first ; | |||
| @@ -140,8 +269,6 @@ void doExport (int argc, char *argv []) | |||
| int pin ; | |||
| char *mode ; | |||
| char fName [128] ; | |||
| uid_t uid ; | |||
| gid_t gid ; | |||
| if (argc != 4) | |||
| { | |||
| @@ -183,27 +310,11 @@ void doExport (int argc, char *argv []) | |||
| // Change ownership so the current user can actually use it! | |||
| uid = getuid () ; | |||
| gid = getgid () ; | |||
| sprintf (fName, "/sys/class/gpio/gpio%d/value", pin) ; | |||
| if (chown (fName, uid, gid) != 0) | |||
| { | |||
| fprintf (stderr, "%s: Unable to change ownership of the value file: %s\n", argv [1], strerror (errno)) ; | |||
| exit (1) ; | |||
| } | |||
| // Also change ownership of the edge file - if it exists | |||
| changeOwner (argv [0], fName) ; | |||
| sprintf (fName, "/sys/class/gpio/gpio%d/edge", pin) ; | |||
| if (chown (fName, uid, gid) != 0) | |||
| { | |||
| if (errno != ENOENT) // Silently ignore File not found - older kernel | |||
| { | |||
| fprintf (stderr, "%s: Unable to change ownership of the value file: %s\n", argv [1], strerror (errno)) ; | |||
| exit (1) ; | |||
| } | |||
| } | |||
| changeOwner (argv [0], fName) ; | |||
| } | |||
| @@ -222,8 +333,6 @@ void doEdge (int argc, char *argv []) | |||
| int pin ; | |||
| char *mode ; | |||
| char fName [128] ; | |||
| uid_t uid ; | |||
| gid_t gid ; | |||
| if (argc != 4) | |||
| { | |||
| @@ -231,8 +340,7 @@ void doEdge (int argc, char *argv []) | |||
| exit (1) ; | |||
| } | |||
| pin = atoi (argv [2]) ; | |||
| pin = atoi (argv [2]) ; | |||
| mode = argv [3] ; | |||
| // Export the pin and set direction to input | |||
| @@ -263,40 +371,23 @@ void doEdge (int argc, char *argv []) | |||
| exit (1) ; | |||
| } | |||
| /**/ if (strcasecmp (mode, "none") == 0) | |||
| fprintf (fd, "none\n") ; | |||
| else if (strcasecmp (mode, "rising") == 0) | |||
| fprintf (fd, "rising\n") ; | |||
| else if (strcasecmp (mode, "falling") == 0) | |||
| fprintf (fd, "falling\n") ; | |||
| else if (strcasecmp (mode, "both") == 0) | |||
| fprintf (fd, "both\n") ; | |||
| /**/ if (strcasecmp (mode, "none") == 0) fprintf (fd, "none\n") ; | |||
| else if (strcasecmp (mode, "rising") == 0) fprintf (fd, "rising\n") ; | |||
| else if (strcasecmp (mode, "falling") == 0) fprintf (fd, "falling\n") ; | |||
| else if (strcasecmp (mode, "both") == 0) fprintf (fd, "both\n") ; | |||
| else | |||
| { | |||
| fprintf (stderr, "%s: Invalid mode: %s. Should be none, rising, falling or both\n", argv [1], mode) ; | |||
| exit (1) ; | |||
| } | |||
| // Change ownership so the current user can actually use it! | |||
| uid = getuid () ; | |||
| gid = getgid () ; | |||
| // Change ownership of the value and edge files, so the current user can actually use it! | |||
| sprintf (fName, "/sys/class/gpio/gpio%d/value", pin) ; | |||
| if (chown (fName, uid, gid) != 0) | |||
| { | |||
| fprintf (stderr, "%s: Unable to change ownership of the value file: %s\n", argv [1], strerror (errno)) ; | |||
| exit (1) ; | |||
| } | |||
| // Also change ownership of the edge file | |||
| changeOwner (argv [0], fName) ; | |||
| sprintf (fName, "/sys/class/gpio/gpio%d/edge", pin) ; | |||
| if (chown (fName, uid, gid) != 0) | |||
| { | |||
| fprintf (stderr, "%s: Unable to change ownership of the value file: %s\n", argv [1], strerror (errno)) ; | |||
| exit (1) ; | |||
| } | |||
| changeOwner (argv [0], fName) ; | |||
| fclose (fd) ; | |||
| } | |||
| @@ -383,18 +474,12 @@ void doMode (int argc, char *argv []) | |||
| mode = argv [3] ; | |||
| /**/ if (strcasecmp (mode, "in") == 0) | |||
| pinMode (pin, INPUT) ; | |||
| else if (strcasecmp (mode, "out") == 0) | |||
| pinMode (pin, OUTPUT) ; | |||
| else if (strcasecmp (mode, "pwm") == 0) | |||
| pinMode (pin, PWM_OUTPUT) ; | |||
| else if (strcasecmp (mode, "up") == 0) | |||
| pullUpDnControl (pin, PUD_UP) ; | |||
| else if (strcasecmp (mode, "down") == 0) | |||
| pullUpDnControl (pin, PUD_DOWN) ; | |||
| else if (strcasecmp (mode, "tri") == 0) | |||
| pullUpDnControl (pin, PUD_OFF) ; | |||
| /**/ if (strcasecmp (mode, "in") == 0) pinMode (pin, INPUT) ; | |||
| else if (strcasecmp (mode, "out") == 0) pinMode (pin, OUTPUT) ; | |||
| else if (strcasecmp (mode, "pwm") == 0) pinMode (pin, PWM_OUTPUT) ; | |||
| else if (strcasecmp (mode, "up") == 0) pullUpDnControl (pin, PUD_UP) ; | |||
| else if (strcasecmp (mode, "down") == 0) pullUpDnControl (pin, PUD_DOWN) ; | |||
| else if (strcasecmp (mode, "tri") == 0) pullUpDnControl (pin, PUD_OFF) ; | |||
| else | |||
| { | |||
| fprintf (stderr, "%s: Invalid mode: %s. Should be in/out/pwm/up/down/tri\n", argv [1], mode) ; | |||
| @@ -402,13 +487,125 @@ void doMode (int argc, char *argv []) | |||
| } | |||
| } | |||
| /* | |||
| * doPadDrive: | |||
| * gpio drive group value | |||
| ********************************************************************************* | |||
| */ | |||
| static void doPadDrive (int argc, char *argv []) | |||
| { | |||
| int group, val ; | |||
| if (argc != 4) | |||
| { | |||
| fprintf (stderr, "Usage: %s drive group value\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| group = atoi (argv [2]) ; | |||
| val = atoi (argv [3]) ; | |||
| if ((group < 0) || (group > 2)) | |||
| { | |||
| fprintf (stderr, "%s: drive group not 0, 1 or 2: %d\n", argv [0], group) ; | |||
| exit (1) ; | |||
| } | |||
| if ((val < 0) || (val > 7)) | |||
| { | |||
| fprintf (stderr, "%s: drive value not 0-7: %d\n", argv [0], val) ; | |||
| exit (1) ; | |||
| } | |||
| setPadDrive (group, val) ; | |||
| } | |||
| /* | |||
| * doGbw: | |||
| * gpio gbw channel value | |||
| ********************************************************************************* | |||
| */ | |||
| static void doGbw (int argc, char *argv []) | |||
| { | |||
| int channel, value ; | |||
| if (argc != 4) | |||
| { | |||
| fprintf (stderr, "Usage: %s gbr <channel> <value>\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| channel = atoi (argv [2]) ; | |||
| value = atoi (argv [3]) ; | |||
| if ((channel < 0) || (channel > 1)) | |||
| { | |||
| fprintf (stderr, "%s: channel must be 0 or 1\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| if ((value < 0) || (value > 1023)) | |||
| { | |||
| fprintf (stderr, "%s: value must be from 0 to 255\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| if (gertboardSPISetup () == -1) | |||
| { | |||
| fprintf (stderr, "Unable to initialise the Gertboard SPI interface: %s\n", strerror (errno)) ; | |||
| exit (1) ; | |||
| } | |||
| gertboardAnalogWrite (channel, value) ; | |||
| } | |||
| /* | |||
| * doGbr: | |||
| * gpio gbr channel | |||
| ********************************************************************************* | |||
| */ | |||
| static void doGbr (int argc, char *argv []) | |||
| { | |||
| int channel ; | |||
| if (argc != 3) | |||
| { | |||
| fprintf (stderr, "Usage: %s gbr <channel>\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| channel = atoi (argv [2]) ; | |||
| if ((channel < 0) || (channel > 1)) | |||
| { | |||
| fprintf (stderr, "%s: channel must be 0 or 1\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| if (gertboardSPISetup () == -1) | |||
| { | |||
| fprintf (stderr, "Unable to initialise the Gertboard SPI interface: %s\n", strerror (errno)) ; | |||
| exit (1) ; | |||
| } | |||
| printf ("%d\n",gertboardAnalogRead (channel)) ; | |||
| } | |||
| /* | |||
| * doWrite: | |||
| * gpio write pin value | |||
| ********************************************************************************* | |||
| */ | |||
| void doWrite (int argc, char *argv []) | |||
| static void doWrite (int argc, char *argv []) | |||
| { | |||
| int pin, val ; | |||
| @@ -490,6 +687,39 @@ void doPwm (int argc, char *argv []) | |||
| /* | |||
| * doPwmMode: doPwmRange: | |||
| * Change the PWM mode and Range values | |||
| ********************************************************************************* | |||
| */ | |||
| static void doPwmMode (int mode) | |||
| { | |||
| pwmSetMode (mode) ; | |||
| } | |||
| static void doPwmRange (int argc, char *argv []) | |||
| { | |||
| unsigned int range ; | |||
| if (argc != 3) | |||
| { | |||
| fprintf (stderr, "Usage: %s pwmr <range>\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| range = (unsigned int)strtoul (argv [2], NULL, 10) ; | |||
| if (range == 0) | |||
| { | |||
| fprintf (stderr, "%s: range must be > 0\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| pwmSetRange (range) ; | |||
| } | |||
| /* | |||
| * main: | |||
| * Start here | |||
| ********************************************************************************* | |||
| @@ -505,10 +735,10 @@ int main (int argc, char *argv []) | |||
| return 1 ; | |||
| } | |||
| if (geteuid () != 0) | |||
| if (strcasecmp (argv [1], "-h") == 0) | |||
| { | |||
| fprintf (stderr, "%s: Must be root to run\n", argv [0]) ; | |||
| return 1 ; | |||
| printf ("%s: %s\n", argv [0], usage) ; | |||
| return 0 ; | |||
| } | |||
| if (strcasecmp (argv [1], "-v") == 0) | |||
| @@ -516,21 +746,54 @@ int main (int argc, char *argv []) | |||
| printf ("gpio version: %s\n", VERSION) ; | |||
| printf ("Copyright (c) 2012 Gordon Henderson\n") ; | |||
| printf ("This is free software with ABSOLUTELY NO WARRANTY.\n") ; | |||
| printf ("For details type: %s -warranty\n", argv [0]) ; | |||
| return 0 ; | |||
| } | |||
| if (strcasecmp (argv [1], "-warranty") == 0) | |||
| { | |||
| printf ("gpio version: %s\n", VERSION) ; | |||
| printf ("Copyright (c) 2012 Gordon Henderson\n") ; | |||
| printf ("\n") ; | |||
| printf (" This program is free software; you can redistribute it and/or modify\n") ; | |||
| printf (" it under the terms of the GNU Leser General Public License as published\n") ; | |||
| printf (" by the Free Software Foundation, either version 3 of the License, or\n") ; | |||
| printf (" (at your option) any later version.\n") ; | |||
| printf ("\n") ; | |||
| printf (" This program is distributed in the hope that it will be useful,\n") ; | |||
| printf (" but WITHOUT ANY WARRANTY; without even the implied warranty of\n") ; | |||
| printf (" MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the\n") ; | |||
| printf (" GNU Lesser General Public License for more details.\n") ; | |||
| printf ("\n") ; | |||
| printf (" You should have received a copy of the GNU Lesser General Public License\n") ; | |||
| printf (" along with this program. If not, see <http://www.gnu.org/licenses/>.\n") ; | |||
| printf ("\n") ; | |||
| return 0 ; | |||
| } | |||
| if (geteuid () != 0) | |||
| { | |||
| fprintf (stderr, "%s: Must be root to run. Program should be suid root. This is an error.\n", argv [0]) ; | |||
| return 1 ; | |||
| } | |||
| // Initial test for /sys/class/gpio operations: | |||
| /**/ if (strcasecmp (argv [1], "exports" ) == 0) | |||
| { doExports () ; return 0 ; } | |||
| else if (strcasecmp (argv [1], "export" ) == 0) | |||
| { doExport (argc, argv) ; return 0 ; } | |||
| else if (strcasecmp (argv [1], "edge" ) == 0) | |||
| { doEdge (argc, argv) ; return 0 ; } | |||
| else if (strcasecmp (argv [1], "unexportall") == 0) | |||
| { doUnexportall (argc, argv) ; return 0 ; } | |||
| else if (strcasecmp (argv [1], "unexport") == 0) | |||
| { doUnexport (argc, argv) ; return 0 ; } | |||
| /**/ if (strcasecmp (argv [1], "exports" ) == 0) { doExports (argc, argv) ; return 0 ; } | |||
| else if (strcasecmp (argv [1], "export" ) == 0) { doExport (argc, argv) ; return 0 ; } | |||
| else if (strcasecmp (argv [1], "edge" ) == 0) { doEdge (argc, argv) ; return 0 ; } | |||
| else if (strcasecmp (argv [1], "unexportall") == 0) { doUnexportall (argc, argv) ; return 0 ; } | |||
| else if (strcasecmp (argv [1], "unexport" ) == 0) { doUnexport (argc, argv) ; return 0 ; } | |||
| // Check for drive or load commands: | |||
| if (strcasecmp (argv [1], "drive") == 0) { doPadDrive (argc, argv) ; return 0 ; } | |||
| if (strcasecmp (argv [1], "load" ) == 0) { doLoad (argc, argv) ; return 0 ; } | |||
| // Gertboard commands | |||
| if (strcasecmp (argv [1], "gbr" ) == 0) { doGbr (argc, argv) ; return 0 ; } | |||
| if (strcasecmp (argv [1], "gbw" ) == 0) { doGbw (argc, argv) ; return 0 ; } | |||
| // Check for -g argument | |||
| @@ -538,7 +801,7 @@ int main (int argc, char *argv []) | |||
| { | |||
| if (wiringPiSetupGpio () == -1) | |||
| { | |||
| fprintf (stderr, "%s: Unable to initialise GPIO in GPIO mode.\n", argv [0]) ; | |||
| fprintf (stderr, "%s: Unable to initialise GPIO mode.\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| @@ -570,23 +833,30 @@ int main (int argc, char *argv []) | |||
| { | |||
| if (wiringPiSetup () == -1) | |||
| { | |||
| fprintf (stderr, "%s: Unable to initialise GPIO in wiringPi mode\n", argv [0]) ; | |||
| fprintf (stderr, "%s: Unable to initialise wiringPi mode\n", argv [0]) ; | |||
| exit (1) ; | |||
| } | |||
| wpMode = WPI_MODE_PINS ; | |||
| } | |||
| /**/ if (strcasecmp (argv [1], "write" ) == 0) | |||
| doWrite (argc, argv) ; | |||
| else if (strcasecmp (argv [1], "read" ) == 0) | |||
| doRead (argc, argv) ; | |||
| else if (strcasecmp (argv [1], "mode" ) == 0) | |||
| doMode (argc, argv) ; | |||
| else if (strcasecmp (argv [1], "pwm" ) == 0) | |||
| doPwm (argc, argv) ; | |||
| // Check for PWM operations | |||
| if (wpMode != WPI_MODE_PIFACE) | |||
| { | |||
| if (strcasecmp (argv [1], "pwm-bal") == 0) { doPwmMode (PWM_MODE_BAL) ; return 0 ; } | |||
| if (strcasecmp (argv [1], "pwm-ms") == 0) { doPwmMode (PWM_MODE_MS) ; return 0 ; } | |||
| if (strcasecmp (argv [1], "pwmr") == 0) { doPwmRange (argc, argv) ; return 0 ; } | |||
| } | |||
| // Check for wiring commands | |||
| /**/ if (strcasecmp (argv [1], "read" ) == 0) doRead (argc, argv) ; | |||
| else if (strcasecmp (argv [1], "write") == 0) doWrite (argc, argv) ; | |||
| else if (strcasecmp (argv [1], "pwm" ) == 0) doPwm (argc, argv) ; | |||
| else if (strcasecmp (argv [1], "mode" ) == 0) doMode (argc, argv) ; | |||
| else | |||
| { | |||
| fprintf (stderr, "%s: Unknown command: %s. (read/write/pwm/mode expected)\n", argv [0], argv [1]) ; | |||
| fprintf (stderr, "%s: Unknown command: %s.\n", argv [0], argv [1]) ; | |||
| exit (1) ; | |||
| } | |||
| return 0 ; | |||
+ 122
- 0
wiringPi/gertboard.c
Прегледај датотеку
| @@ -0,0 +1,122 @@ | |||
| /* | |||
| * gertboard.c: | |||
| * Access routines for the SPI devices on the Gertboard | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| * | |||
| * The Gertboard has: | |||
| * | |||
| * An MCP3002 dual-channel A to D convertor connected | |||
| * to the SPI bus, selected by chip-select A, and: | |||
| * | |||
| * An MCP4802 dual-channel D to A convertor connected | |||
| * to the SPI bus, selected via chip-select B. | |||
| * | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| * https://projects.drogon.net/raspberry-pi/wiringpi/ | |||
| * | |||
| * wiringPi is free software: you can redistribute it and/or modify | |||
| * it under the terms of the GNU Lesser General Public License as | |||
| * published by the Free Software Foundation, either version 3 of the | |||
| * License, or (at your option) any later version. | |||
| * | |||
| * wiringPi is distributed in the hope that it will be useful, | |||
| * but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| * GNU Lesser General Public License for more details. | |||
| * | |||
| * You should have received a copy of the GNU Lesser General Public | |||
| * License along with wiringPi. | |||
| * If not, see <http://www.gnu.org/licenses/>. | |||
| *********************************************************************** | |||
| */ | |||
| #include <stdio.h> | |||
| #include <stdint.h> | |||
| #include <fcntl.h> | |||
| #include <sys/ioctl.h> | |||
| #include <linux/spi/spidev.h> | |||
| #include "wiringPiSPI.h" | |||
| #include "gertboard.h" | |||
| // The A-D convertor won't run at more than 1MHz @ 3.3v | |||
| #define SPI_ADC_SPEED 1000000 | |||
| #define SPI_DAC_SPEED 1000000 | |||
| #define SPI_A2D 0 | |||
| #define SPI_D2A 1 | |||
| /* | |||
| * gertboardAnalogWrite: | |||
| * Write an 8-bit data value to the MCP4802 Analog to digital | |||
| * convertor on the Gertboard. | |||
| ********************************************************************************* | |||
| */ | |||
| void gertboardAnalogWrite (int chan, int value) | |||
| { | |||
| uint8_t spiData [2] ; | |||
| uint8_t chanBits, dataBits ; | |||
| if (chan == 0) | |||
| chanBits = 0x30 ; | |||
| else | |||
| chanBits = 0xB0 ; | |||
| chanBits |= ((value >> 4) & 0x0F) ; | |||
| dataBits = ((value << 4) & 0xF0) ; | |||
| spiData [0] = chanBits ; | |||
| spiData [1] = dataBits ; | |||
| wiringPiSPIDataRW (SPI_D2A, spiData, 2) ; | |||
| } | |||
| /* | |||
| * gertboardAnalogRead: | |||
| * Return the analog value of the given channel (0/1). | |||
| * The A/D is a 10-bit device | |||
| ********************************************************************************* | |||
| */ | |||
| int gertboardAnalogRead (int chan) | |||
| { | |||
| uint8_t spiData [2] ; | |||
| uint8_t chanBits ; | |||
| if (chan == 0) | |||
| chanBits = 0b11010000 ; | |||
| else | |||
| chanBits = 0b11110000 ; | |||
| spiData [0] = chanBits ; | |||
| spiData [1] = 0 ; | |||
| wiringPiSPIDataRW (SPI_A2D, spiData, 2) ; | |||
| return ((spiData [0] << 7) | (spiData [1] >> 1)) & 0x3FF ; | |||
| } | |||
| /* | |||
| * gertboardSPISetup: | |||
| * Initialise the SPI bus, etc. | |||
| ********************************************************************************* | |||
| */ | |||
| int gertboardSPISetup (void) | |||
| { | |||
| if (wiringPiSPISetup (SPI_A2D, SPI_ADC_SPEED) < 0) | |||
| return -1 ; | |||
| if (wiringPiSPISetup (SPI_D2A, SPI_DAC_SPEED) < 0) | |||
| return -1 ; | |||
| return 0 ; | |||
| } | |||
+ 39
- 0
wiringPi/gertboard.h
Прегледај датотеку
| @@ -0,0 +1,39 @@ | |||
| /* | |||
| * gertboard.h: | |||
| * Access routines for the SPI devices on the Gertboard | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| * | |||
| * The Gertboard has an MCP4802 dual-channel D to A convertor | |||
| * connected to the SPI bus, selected via chip-select B. | |||
| * | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| * https://projects.drogon.net/raspberry-pi/wiringpi/ | |||
| * | |||
| * wiringPi is free software: you can redistribute it and/or modify | |||
| * it under the terms of the GNU Lesser General Public License as | |||
| * published by the Free Software Foundation, either version 3 of the | |||
| * License, or (at your option) any later version. | |||
| * | |||
| * wiringPi is distributed in the hope that it will be useful, | |||
| * but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| * GNU Lesser General Public License for more details. | |||
| * | |||
| * You should have received a copy of the GNU Lesser General Public | |||
| * License along with wiringPi. | |||
| * If not, see <http://www.gnu.org/licenses/>. | |||
| *********************************************************************** | |||
| */ | |||
| #ifdef __cplusplus | |||
| extern "C" { | |||
| #endif | |||
| extern void gertboardAnalogWrite (int chan, int value) ; | |||
| extern int gertboardAnalogRead (int chan) ; | |||
| extern int gertboardSPISetup (void) ; | |||
| #ifdef __cplusplus | |||
| } | |||
| #endif | |||
+ 8
- 0
wiringPi/lcd.h
Прегледај датотеку
| @@ -33,5 +33,13 @@ extern void lcdPutchar (int fd, uint8_t data) ; | |||
| extern void lcdPuts (int fd, char *string) ; | |||
| extern void lcdPrintf (int fd, char *message, ...) ; | |||
| #ifdef __cplusplus | |||
| extern "C" { | |||
| #endif | |||
| extern int lcdInit (int rows, int cols, int bits, int rs, int strb, | |||
| int d0, int d1, int d2, int d3, int d4, int d5, int d6, int d7) ; | |||
| #ifdef __cplusplus | |||
| } | |||
| #endif | |||
+ 113
- 0
wiringPi/piNes.c
Прегледај датотеку
| @@ -0,0 +1,113 @@ | |||
| /* | |||
| * piNes.c: | |||
| * Driver for the NES Joystick controller on the Raspberry Pi | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| * https://projects.drogon.net/raspberry-pi/wiringpi/ | |||
| * | |||
| * wiringPi is free software: you can redistribute it and/or modify | |||
| * it under the terms of the GNU Lesser General Public License as | |||
| * published by the Free Software Foundation, either version 3 of the | |||
| * License, or (at your option) any later version. | |||
| * | |||
| * wiringPi is distributed in the hope that it will be useful, | |||
| * but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| * GNU Lesser General Public License for more details. | |||
| * | |||
| * You should have received a copy of the GNU Lesser General Public | |||
| * License along with wiringPi. | |||
| * If not, see <http://www.gnu.org/licenses/>. | |||
| *********************************************************************** | |||
| */ | |||
| #include <wiringPi.h> | |||
| #include "piNes.h" | |||
| #define MAX_NES_JOYSTICKS 8 | |||
| #define NES_RIGHT 0x01 | |||
| #define NES_LEFT 0x02 | |||
| #define NES_DOWN 0x04 | |||
| #define NES_UP 0x08 | |||
| #define NES_START 0x10 | |||
| #define NES_SELECT 0x20 | |||
| #define NES_B 0x40 | |||
| #define NES_A 0x80 | |||
| #define PULSE_TIME 25 | |||
| // Data to store the pins for each controller | |||
| struct nesPinsStruct | |||
| { | |||
| unsigned int cPin, dPin, lPin ; | |||
| } ; | |||
| static struct nesPinsStruct nesPins [MAX_NES_JOYSTICKS] ; | |||
| static int joysticks = 0 ; | |||
| /* | |||
| * setupNesJoystick: | |||
| * Create a new NES joystick interface, program the pins, etc. | |||
| ********************************************************************************* | |||
| */ | |||
| int setupNesJoystick (int dPin, int cPin, int lPin) | |||
| { | |||
| if (joysticks == MAX_NES_JOYSTICKS) | |||
| return -1 ; | |||
| nesPins [joysticks].dPin = dPin ; | |||
| nesPins [joysticks].cPin = cPin ; | |||
| nesPins [joysticks].lPin = lPin ; | |||
| digitalWrite (lPin, LOW) ; | |||
| digitalWrite (cPin, LOW) ; | |||
| pinMode (lPin, OUTPUT) ; | |||
| pinMode (cPin, OUTPUT) ; | |||
| pinMode (dPin, INPUT) ; | |||
| return joysticks++ ; | |||
| } | |||
| /* | |||
| * readNesJoystick: | |||
| * Do a single scan of the NES Joystick. | |||
| ********************************************************************************* | |||
| */ | |||
| unsigned int readNesJoystick (int joystick) | |||
| { | |||
| unsigned int value = 0 ; | |||
| int i ; | |||
| struct nesPinsStruct *pins = &nesPins [joystick] ; | |||
| // Toggle Latch - which presents the first bit | |||
| digitalWrite (pins->lPin, HIGH) ; delayMicroseconds (PULSE_TIME) ; | |||
| digitalWrite (pins->lPin, LOW) ; delayMicroseconds (PULSE_TIME) ; | |||
| // Read first bit | |||
| value = digitalRead (pins->dPin) ; | |||
| // Now get the next 7 bits with the clock | |||
| for (i = 0 ; i < 7 ; ++i) | |||
| { | |||
| digitalWrite (pins->cPin, HIGH) ; delayMicroseconds (PULSE_TIME) ; | |||
| digitalWrite (pins->cPin, LOW) ; delayMicroseconds (PULSE_TIME) ; | |||
| value = (value << 1) | digitalRead (pins->dPin) ; | |||
| } | |||
| return value ^ 0xFF ; | |||
| } | |||
+ 45
- 0
wiringPi/piNes.h
Прегледај датотеку
| @@ -0,0 +1,45 @@ | |||
| /* | |||
| * piNes.h: | |||
| * Driver for the NES Joystick controller on the Raspberry Pi | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| * https://projects.drogon.net/raspberry-pi/wiringpi/ | |||
| * | |||
| * wiringPi is free software: you can redistribute it and/or modify | |||
| * it under the terms of the GNU Lesser General Public License as | |||
| * published by the Free Software Foundation, either version 3 of the | |||
| * License, or (at your option) any later version. | |||
| * | |||
| * wiringPi is distributed in the hope that it will be useful, | |||
| * but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| * GNU Lesser General Public License for more details. | |||
| * | |||
| * You should have received a copy of the GNU Lesser General Public | |||
| * License along with wiringPi. | |||
| * If not, see <http://www.gnu.org/licenses/>. | |||
| *********************************************************************** | |||
| */ | |||
| #define MAX_NES_JOYSTICKS 8 | |||
| #define NES_RIGHT 0x01 | |||
| #define NES_LEFT 0x02 | |||
| #define NES_DOWN 0x04 | |||
| #define NES_UP 0x08 | |||
| #define NES_START 0x10 | |||
| #define NES_SELECT 0x20 | |||
| #define NES_B 0x40 | |||
| #define NES_A 0x80 | |||
| #ifdef __cplusplus | |||
| extern "C" { | |||
| #endif | |||
| extern int setupNesJoystick (int dPin, int cPin, int lPin) ; | |||
| extern unsigned int readNesJoystick (int joystick) ; | |||
| #ifdef __cplusplus | |||
| } | |||
| #endif | |||
+ 130
- 0
wiringPi/softPwm.c
Прегледај датотеку
| @@ -0,0 +1,130 @@ | |||
| /* | |||
| * softPwm.c: | |||
| * Provide 2 channels of software driven PWM. | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| * https://projects.drogon.net/raspberry-pi/wiringpi/ | |||
| * | |||
| * wiringPi is free software: you can redistribute it and/or modify | |||
| * it under the terms of the GNU Lesser General Public License as | |||
| * published by the Free Software Foundation, either version 3 of the | |||
| * License, or (at your option) any later version. | |||
| * | |||
| * wiringPi is distributed in the hope that it will be useful, | |||
| * but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| * GNU Lesser General Public License for more details. | |||
| * | |||
| * You should have received a copy of the GNU Lesser General Public | |||
| * License along with wiringPi. | |||
| * If not, see <http://www.gnu.org/licenses/>. | |||
| *********************************************************************** | |||
| */ | |||
| #include <stdio.h> | |||
| #include <pthread.h> | |||
| #include "wiringPi.h" | |||
| #include "softPwm.h" | |||
| #define MAX_PINS 64 | |||
| // The PWM Frequency is derived from the "pulse time" below. Essentially, | |||
| // the frequency is a function of the range and this pulse time. | |||
| // The total period will be range * pulse time in uS, so a pulse time | |||
| // of 100 and a range of 100 gives a period of 100 * 100 = 10,000 uS | |||
| // which is a frequency of 100Hz. | |||
| // | |||
| // It's possible to get a higher frequency by lowering the pulse time, | |||
| // however CPU uage will skyrocket as wiringPi uses a hard-loop to time | |||
| // periods under 100uS - this is because the Linux timer calls are just | |||
| // accurate at all, and have an overhead. | |||
| // | |||
| // Another way to increase the frequency is to reduce the range - however | |||
| // that reduces the overall output accuracy... | |||
| #define PULSE_TIME 100 | |||
| static int marks [MAX_PINS] ; | |||
| static int range [MAX_PINS] ; | |||
| int newPin = -1 ; | |||
| /* | |||
| * softPwmThread: | |||
| * Thread to do the actual PWM output | |||
| ********************************************************************************* | |||
| */ | |||
| static PI_THREAD (softPwmThread) | |||
| { | |||
| int pin, mark, space ; | |||
| pin = newPin ; | |||
| newPin = -1 ; | |||
| piHiPri (50) ; | |||
| for (;;) | |||
| { | |||
| mark = marks [pin] ; | |||
| space = range [pin] - mark ; | |||
| if (mark != 0) | |||
| digitalWrite (pin, HIGH) ; | |||
| delayMicroseconds (mark * 100) ; | |||
| if (space != 0) | |||
| digitalWrite (pin, LOW) ; | |||
| delayMicroseconds (space * 100) ; | |||
| } | |||
| return NULL ; | |||
| } | |||
| /* | |||
| * softPwmWrite: | |||
| * Write a PWM value to the given pin | |||
| ********************************************************************************* | |||
| */ | |||
| void softPwmWrite (int pin, int value) | |||
| { | |||
| pin &= 63 ; | |||
| /**/ if (value < 0) | |||
| value = 0 ; | |||
| else if (value > range [pin]) | |||
| value = range [pin] ; | |||
| marks [pin] = value ; | |||
| } | |||
| /* | |||
| * softPwmCreate: | |||
| * Create a new PWM thread. | |||
| ********************************************************************************* | |||
| */ | |||
| int softPwmCreate (int pin, int initialValue, int pwmRange) | |||
| { | |||
| int res ; | |||
| pinMode (pin, OUTPUT) ; | |||
| digitalWrite (pin, LOW) ; | |||
| marks [pin] = initialValue ; | |||
| range [pin] = pwmRange ; | |||
| newPin = pin ; | |||
| res = piThreadCreate (softPwmThread) ; | |||
| while (newPin != -1) | |||
| delay (1) ; | |||
| return res ; | |||
| } | |||
+ 34
- 0
wiringPi/softPwm.h
Прегледај датотеку
| @@ -0,0 +1,34 @@ | |||
| /* | |||
| * softPwm.h: | |||
| * Provide 2 channels of software driven PWM. | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| * https://projects.drogon.net/raspberry-pi/wiringpi/ | |||
| * | |||
| * wiringPi is free software: you can redistribute it and/or modify | |||
| * it under the terms of the GNU Lesser General Public License as | |||
| * published by the Free Software Foundation, either version 3 of the | |||
| * License, or (at your option) any later version. | |||
| * | |||
| * wiringPi is distributed in the hope that it will be useful, | |||
| * but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| * GNU Lesser General Public License for more details. | |||
| * | |||
| * You should have received a copy of the GNU Lesser General Public | |||
| * License along with wiringPi. | |||
| * If not, see <http://www.gnu.org/licenses/>. | |||
| *********************************************************************** | |||
| */ | |||
| #ifdef __cplusplus | |||
| extern "C" { | |||
| #endif | |||
| extern int softPwmCreate (int pin, int value, int range) ; | |||
| extern void softPwmWrite (int pin, int value) ; | |||
| #ifdef __cplusplus | |||
| } | |||
| #endif | |||
+ 296
- 135
wiringPi/wiringPi.c
Прегледај датотеку
| @@ -71,12 +71,16 @@ | |||
| // Function stubs | |||
| void (*pinMode) (int pin, int mode) ; | |||
| void (*pullUpDnControl) (int pin, int pud) ; | |||
| void (*digitalWrite) (int pin, int value) ; | |||
| void (*pwmWrite) (int pin, int value) ; | |||
| int (*digitalRead) (int pin) ; | |||
| int (*waitForInterrupt) (int pin, int mS) ; | |||
| void (*pinMode) (int pin, int mode) ; | |||
| void (*pullUpDnControl) (int pin, int pud) ; | |||
| void (*digitalWrite) (int pin, int value) ; | |||
| void (*pwmWrite) (int pin, int value) ; | |||
| void (*setPadDrive) (int group, int value) ; | |||
| int (*digitalRead) (int pin) ; | |||
| int (*waitForInterrupt) (int pin, int mS) ; | |||
| void (*delayMicroseconds) (unsigned int howLong) ; | |||
| void (*pwmSetMode) (int mode) ; | |||
| void (*pwmSetRange) (unsigned int range) ; | |||
| #ifndef TRUE | |||
| @@ -84,6 +88,11 @@ int (*waitForInterrupt) (int pin, int mS) ; | |||
| #define FALSE (1==2) | |||
| #endif | |||
| // BCM Magic | |||
| #define BCM_PASSWORD 0x5A000000 | |||
| // Port function select bits | |||
| #define FSEL_INPT 0b000 | |||
| @@ -100,10 +109,11 @@ int (*waitForInterrupt) (int pin, int mS) ; | |||
| // Take from Gert/Doms code. Some of this is not in the manual | |||
| // that I can find )-: | |||
| #define BCM2708_PERI_BASE 0x20000000 | |||
| #define BCM2708_PERI_BASE 0x20000000 | |||
| #define GPIO_PADS (BCM2708_PERI_BASE + 0x100000) | |||
| #define CLOCK_BASE (BCM2708_PERI_BASE + 0x101000) | |||
| #define GPIO_BASE (BCM2708_PERI_BASE + 0x200000) | |||
| #define GPIO_TIMER (BCM2708_PERI_BASE + 0x00B000) | |||
| #define GPIO_PWM (BCM2708_PERI_BASE + 0x20C000) | |||
| #define PAGE_SIZE (4*1024) | |||
| @@ -137,12 +147,27 @@ int (*waitForInterrupt) (int pin, int mS) ; | |||
| #define PWM0_SERIAL 0x0002 // Run in serial mode | |||
| #define PWM0_ENABLE 0x0001 // Channel Enable | |||
| // Timer | |||
| #define TIMER_LOAD (0x400 >> 2) | |||
| #define TIMER_VALUE (0x404 >> 2) | |||
| #define TIMER_CONTROL (0x408 >> 2) | |||
| #define TIMER_IRQ_CLR (0x40C >> 2) | |||
| #define TIMER_IRQ_RAW (0x410 >> 2) | |||
| #define TIMER_IRQ_MASK (0x414 >> 2) | |||
| #define TIMER_RELOAD (0x418 >> 2) | |||
| #define TIMER_PRE_DIV (0x41C >> 2) | |||
| #define TIMER_COUNTER (0x420 >> 2) | |||
| // Locals to hold pointers to the hardware | |||
| static volatile uint32_t *gpio ; | |||
| static volatile uint32_t *pwm ; | |||
| static volatile uint32_t *clk ; | |||
| static volatile uint32_t *pads ; | |||
| static volatile uint32_t *timer ; | |||
| static volatile uint32_t *timerIrqRaw ; | |||
| // The BCM2835 has 54 GPIO pins. | |||
| // BCM2835 data sheet, Page 90 onwards. | |||
| @@ -273,6 +298,8 @@ static uint8_t gpioToFEN [] = | |||
| // gpioToPUDCLK | |||
| // (Word) offset to the Pull Up Down Clock regsiter | |||
| #define GPPUD 37 | |||
| static uint8_t gpioToPUDCLK [] = | |||
| { | |||
| 38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38,38, | |||
| @@ -352,30 +379,42 @@ void pinModeGpio (int pin, int mode) | |||
| if (!pwmRunning) | |||
| { | |||
| // Gert/Doms Values | |||
| *(clk + PWMCLK_DIV) = 0x5A000000 | (32<<12) ; // set pwm div to 32 (19.2/3 = 600KHz) | |||
| *(clk + PWMCLK_CNTL) = 0x5A000011 ; // Source=osc and enable | |||
| digitalWrite (pin, LOW) ; | |||
| *(pwm + PWM_CONTROL) = 0 ; // Disable PWM | |||
| *(pwm + PWM_CONTROL) = 0 ; // Stop PWM | |||
| delayMicroseconds (10) ; | |||
| *(pwm + PWM0_RANGE) = 0x400 ; | |||
| delayMicroseconds (10) ; | |||
| *(pwm + PWM1_RANGE) = 0x400 ; | |||
| // Gert/Doms Values | |||
| *(clk + PWMCLK_DIV) = BCM_PASSWORD | (32<<12) ; // set pwm div to 32 (19.2/32 = 600KHz) | |||
| *(clk + PWMCLK_CNTL) = BCM_PASSWORD | 0x11 ; // Source=osc and enable | |||
| delayMicroseconds (10) ; | |||
| *(pwm + PWM0_RANGE) = 0x400 ; delayMicroseconds (10) ; | |||
| *(pwm + PWM1_RANGE) = 0x400 ; delayMicroseconds (10) ; | |||
| // Enable PWMs | |||
| *(pwm + PWM0_DATA) = 512 ; | |||
| *(pwm + PWM1_DATA) = 512 ; | |||
| // Balanced mode (default) | |||
| *(pwm + PWM_CONTROL) = PWM0_ENABLE | PWM1_ENABLE ; | |||
| pwmRunning = TRUE ; | |||
| } | |||
| } | |||
| // When we change mode of any pin, we remove the pull up/downs | |||
| // Or we used to... Hm. Commented out now because for some wieird reason, | |||
| // it seems to block subsequent attempts to set the pull up/downs and I've | |||
| // not quite gotten to the bottom of why this happens | |||
| // The down-side is that the pull up/downs are rememberd in the SoC between | |||
| // power cycles, so it's going to be a good idea to explicitly set them in | |||
| // any new code. | |||
| // | |||
| // pullUpDnControl (pin, PUD_OFF) ; | |||
| pullUpDnControl (pin, PUD_OFF) ; | |||
| } | |||
| void pinModeWPi (int pin, int mode) | |||
| @@ -389,6 +428,38 @@ void pinModeSys (int pin, int mode) | |||
| } | |||
| /* | |||
| * pwmControl: | |||
| * Allow the user to control some of the PWM functions | |||
| ********************************************************************************* | |||
| */ | |||
| void pwmSetModeWPi (int mode) | |||
| { | |||
| if (mode == PWM_MODE_MS) | |||
| *(pwm + PWM_CONTROL) = PWM0_ENABLE | PWM1_ENABLE | PWM0_MS_MODE | PWM1_MS_MODE ; | |||
| else | |||
| *(pwm + PWM_CONTROL) = PWM0_ENABLE | PWM1_ENABLE ; | |||
| } | |||
| void pwmSetModeSys (int mode) | |||
| { | |||
| return ; | |||
| } | |||
| void pwmSetRangeWPi (unsigned int range) | |||
| { | |||
| *(pwm + PWM0_RANGE) = range ; delayMicroseconds (10) ; | |||
| *(pwm + PWM1_RANGE) = range ; delayMicroseconds (10) ; | |||
| } | |||
| void pwmSetRangeSys (unsigned int range) | |||
| { | |||
| return ; | |||
| } | |||
| #ifdef notYetReady | |||
| /* | |||
| * pinED01: | |||
| @@ -414,12 +485,12 @@ void pinEnableED01Pi (int pin) | |||
| void digitalWriteWPi (int pin, int value) | |||
| { | |||
| int gpioPin = pinToGpio [pin & 63] ; | |||
| pin = pinToGpio [pin & 63] ; | |||
| if (value == LOW) | |||
| *(gpio + gpioToGPCLR [gpioPin]) = 1 << gpioPin ; | |||
| *(gpio + gpioToGPCLR [pin]) = 1 << (pin & 31) ; | |||
| else | |||
| *(gpio + gpioToGPSET [gpioPin]) = 1 << gpioPin ; | |||
| *(gpio + gpioToGPSET [pin]) = 1 << (pin & 31) ; | |||
| } | |||
| void digitalWriteGpio (int pin, int value) | |||
| @@ -427,9 +498,9 @@ void digitalWriteGpio (int pin, int value) | |||
| pin &= 63 ; | |||
| if (value == LOW) | |||
| *(gpio + gpioToGPCLR [pin]) = 1 << pin ; | |||
| *(gpio + gpioToGPCLR [pin]) = 1 << (pin & 31) ; | |||
| else | |||
| *(gpio + gpioToGPSET [pin]) = 1 << pin ; | |||
| *(gpio + gpioToGPSET [pin]) = 1 << (pin & 31) ; | |||
| } | |||
| void digitalWriteSys (int pin, int value) | |||
| @@ -452,28 +523,55 @@ void digitalWriteSys (int pin, int value) | |||
| ********************************************************************************* | |||
| */ | |||
| void pwmWriteWPi (int pin, int value) | |||
| void pwmWriteGpio (int pin, int value) | |||
| { | |||
| int port, gpioPin ; | |||
| int port ; | |||
| gpioPin = pinToGpio [pin & 63] ; | |||
| port = gpioToPwmPort [gpioPin] ; | |||
| pin = pin & 63 ; | |||
| port = gpioToPwmPort [pin] ; | |||
| *(pwm + port) = value & 0x3FF ; | |||
| *(pwm + port) = value ; | |||
| } | |||
| void pwmWriteGpio (int pin, int value) | |||
| void pwmWriteWPi (int pin, int value) | |||
| { | |||
| pwmWriteGpio (pinToGpio [pin & 63], value) ; | |||
| } | |||
| void pwmWriteSys (int pin, int value) | |||
| { | |||
| return ; | |||
| } | |||
| /* | |||
| * setPadDrive: | |||
| * Set the PAD driver value | |||
| ********************************************************************************* | |||
| */ | |||
| void setPadDriveWPi (int group, int value) | |||
| { | |||
| int port, gpioPin ; | |||
| uint32_t wrVal ; | |||
| gpioPin = pin & 63 ; | |||
| port = gpioToPwmPort [gpioPin] ; | |||
| if ((group < 0) || (group > 2)) | |||
| return ; | |||
| *(pwm + port) = value & 0x3FF ; | |||
| wrVal = BCM_PASSWORD | 0x18 | (value & 7) ; | |||
| *(pads + group + 11) = wrVal ; | |||
| #ifdef DEBUG_PADS | |||
| printf ("setPadDrive: Group: %d, value: %d (%08X)\n", group, value, wrVal) ; | |||
| printf ("Read : %08X\n", *(pads + group + 11)) ; | |||
| #endif | |||
| } | |||
| void setPadDriveGpio (int group, int value) | |||
| { | |||
| setPadDriveWPi (group, value) ; | |||
| } | |||
| void pwmWriteSys (int pin, int value) | |||
| void setPadDriveSys (int group, int value) | |||
| { | |||
| return ; | |||
| } | |||
| @@ -487,13 +585,9 @@ void pwmWriteSys (int pin, int value) | |||
| int digitalReadWPi (int pin) | |||
| { | |||
| int gpioPin ; | |||
| pin &= 63 ; | |||
| gpioPin = pinToGpio [pin] ; | |||
| pin = pinToGpio [pin & 63] ; | |||
| if ((*(gpio + gpioToGPLEV [gpioPin]) & (1 << gpioPin)) != 0) | |||
| if ((*(gpio + gpioToGPLEV [pin]) & (1 << (pin & 31))) != 0) | |||
| return HIGH ; | |||
| else | |||
| return LOW ; | |||
| @@ -503,7 +597,7 @@ int digitalReadGpio (int pin) | |||
| { | |||
| pin &= 63 ; | |||
| if ((*(gpio + gpioToGPLEV [pin]) & (1 << pin)) != 0) | |||
| if ((*(gpio + gpioToGPLEV [pin]) & (1 << (pin & 31))) != 0) | |||
| return HIGH ; | |||
| else | |||
| return LOW ; | |||
| @@ -533,30 +627,21 @@ int digitalReadSys (int pin) | |||
| ********************************************************************************* | |||
| */ | |||
| void pullUpDnControlWPi (int pin, int pud) | |||
| void pullUpDnControlGpio (int pin, int pud) | |||
| { | |||
| pin = pinToGpio [pin & 63] ; | |||
| pin &= 63 ; | |||
| pud &= 3 ; | |||
| *(gpio + 37) = pud ; | |||
| delayMicroseconds (10) ; | |||
| *(gpio + gpioToPUDCLK [pin]) = 1 << pin ; | |||
| delayMicroseconds (10) ; | |||
| *(gpio + GPPUD) = pud ; delayMicroseconds (5) ; | |||
| *(gpio + gpioToPUDCLK [pin]) = 1 << (pin & 31) ; delayMicroseconds (5) ; | |||
| *(gpio + 37) = 0 ; | |||
| *(gpio + gpioToPUDCLK [pin]) = 0 ; | |||
| *(gpio + GPPUD) = 0 ; delayMicroseconds (5) ; | |||
| *(gpio + gpioToPUDCLK [pin]) = 0 ; delayMicroseconds (5) ; | |||
| } | |||
| void pullUpDnControlGpio (int pin, int pud) | |||
| void pullUpDnControlWPi (int pin, int pud) | |||
| { | |||
| pin &= 63 ; | |||
| *(gpio + 37) = pud ; | |||
| delayMicroseconds (10) ; | |||
| *(gpio + gpioToPUDCLK [pin]) = 1 << pin ; | |||
| delayMicroseconds (10) ; | |||
| *(gpio + 37) = 0 ; | |||
| *(gpio + gpioToPUDCLK [pin]) = 0 ; | |||
| pullUpDnControlGpio (pinToGpio [pin & 63], pud) ; | |||
| } | |||
| void pullUpDnControlSys (int pin, int pud) | |||
| @@ -615,6 +700,94 @@ int waitForInterruptGpio (int pin, int mS) | |||
| /* | |||
| * delay: | |||
| * Wait for some number of milli seconds | |||
| ********************************************************************************* | |||
| */ | |||
| void delay (unsigned int howLong) | |||
| { | |||
| struct timespec sleeper, dummy ; | |||
| sleeper.tv_sec = (time_t)(howLong / 1000) ; | |||
| sleeper.tv_nsec = (long)(howLong % 1000) * 1000000 ; | |||
| nanosleep (&sleeper, &dummy) ; | |||
| } | |||
| /* | |||
| * delayMicroseconds: | |||
| * This is somewhat intersting. It seems that on the Pi, a single call | |||
| * to nanosleep takes some 80 to 130 microseconds anyway, so while | |||
| * obeying the standards (may take longer), it's not always what we | |||
| * want! | |||
| * | |||
| * So what I'll do now is if the delay is less than 100uS we'll do it | |||
| * in a hard loop, watching a built-in counter on the ARM chip. This is | |||
| * somewhat sub-optimal in that it uses 100% CPU, something not an issue | |||
| * in a microcontroller, but under a multi-tasking, multi-user OS, it's | |||
| * wastefull, however we've no real choice )-: | |||
| ********************************************************************************* | |||
| */ | |||
| void delayMicrosecondsSys (unsigned int howLong) | |||
| { | |||
| struct timespec sleeper, dummy ; | |||
| sleeper.tv_sec = 0 ; | |||
| sleeper.tv_nsec = (long)(howLong * 1000) ; | |||
| nanosleep (&sleeper, &dummy) ; | |||
| } | |||
| void delayMicrosecondsHard (unsigned int howLong) | |||
| { | |||
| *(timer + TIMER_LOAD) = howLong ; | |||
| *(timer + TIMER_IRQ_CLR) = 0 ; | |||
| while (*timerIrqRaw == 0) | |||
| ; | |||
| } | |||
| void delayMicrosecondsWPi (unsigned int howLong) | |||
| { | |||
| struct timespec sleeper, dummy ; | |||
| /**/ if (howLong == 0) | |||
| return ; | |||
| else if (howLong < 100) | |||
| delayMicrosecondsHard (howLong) ; | |||
| else | |||
| { | |||
| sleeper.tv_sec = 0 ; | |||
| sleeper.tv_nsec = (long)(howLong * 1000) ; | |||
| nanosleep (&sleeper, &dummy) ; | |||
| } | |||
| } | |||
| /* | |||
| * millis: | |||
| * Return a number of milliseconds as an unsigned int. | |||
| ********************************************************************************* | |||
| */ | |||
| unsigned int millis (void) | |||
| { | |||
| struct timeval tv ; | |||
| unsigned long long t1 ; | |||
| gettimeofday (&tv, NULL) ; | |||
| t1 = (tv.tv_sec * 1000000 + tv.tv_usec) / 1000 ; | |||
| return (uint32_t)(t1 - epoch) ; | |||
| } | |||
| /* | |||
| * wiringPiSetup: | |||
| * Must be called once at the start of your program execution. | |||
| @@ -627,20 +800,19 @@ int waitForInterruptGpio (int pin, int mS) | |||
| int wiringPiSetup (void) | |||
| { | |||
| int fd ; | |||
| uint8_t *gpioMem, *pwmMem, *clkMem ; | |||
| uint8_t *gpioMem, *pwmMem, *clkMem, *padsMem, *timerMem ; | |||
| struct timeval tv ; | |||
| #ifdef DEBUG_PADS | |||
| uint8_t *gpioMem, *padsMem, *pwmMem, *clkMem ; | |||
| uint32_t *pads ; | |||
| #endif | |||
| pinMode = pinModeWPi ; | |||
| pullUpDnControl = pullUpDnControlWPi ; | |||
| digitalWrite = digitalWriteWPi ; | |||
| pwmWrite = pwmWriteWPi ; | |||
| digitalRead = digitalReadWPi ; | |||
| waitForInterrupt = waitForInterruptWPi ; | |||
| pinMode = pinModeWPi ; | |||
| pullUpDnControl = pullUpDnControlWPi ; | |||
| digitalWrite = digitalWriteWPi ; | |||
| pwmWrite = pwmWriteWPi ; | |||
| setPadDrive = setPadDriveWPi ; | |||
| digitalRead = digitalReadWPi ; | |||
| waitForInterrupt = waitForInterruptWPi ; | |||
| delayMicroseconds = delayMicrosecondsWPi ; | |||
| pwmSetMode = pwmSetModeWPi ; | |||
| pwmSetRange = pwmSetRangeWPi ; | |||
| // Open the master /dev/memory device | |||
| @@ -711,7 +883,8 @@ int wiringPiSetup (void) | |||
| return -1 ; | |||
| } | |||
| #ifdef DEBUG_PADS | |||
| // The drive pads | |||
| if ((padsMem = malloc (BLOCK_SIZE + (PAGE_SIZE-1))) == NULL) | |||
| { | |||
| fprintf (stderr, "wiringPiSetup: padsMem malloc failed: %s\n", strerror (errno)) ; | |||
| @@ -728,14 +901,41 @@ int wiringPiSetup (void) | |||
| fprintf (stderr, "wiringPiSetup: mmap failed (pads): %s\n", strerror (errno)) ; | |||
| return -1 ; | |||
| } | |||
| printf ("Checking pads @ 0x%08X\n", (unsigned int)pads) ; | |||
| printf ("%08X %08X %08X\n", *(pads + 11), *(pads + 12), *(pads + 13)) ; | |||
| // *(pads + 11) = 0x1F ; | |||
| printf ("%08X %08X %08X\n", *(pads + 11), *(pads + 12), *(pads + 13)) ; | |||
| #ifdef DEBUG_PADS | |||
| printf ("Checking pads @ 0x%08X\n", (unsigned int)pads) ; | |||
| printf (" -> %08X %08X %08X\n", *(pads + 11), *(pads + 12), *(pads + 13)) ; | |||
| #endif | |||
| // The system timer | |||
| if ((timerMem = malloc (BLOCK_SIZE + (PAGE_SIZE-1))) == NULL) | |||
| { | |||
| fprintf (stderr, "wiringPiSetup: timerMem malloc failed: %s\n", strerror (errno)) ; | |||
| return -1 ; | |||
| } | |||
| if (((uint32_t)timerMem % PAGE_SIZE) != 0) | |||
| timerMem += PAGE_SIZE - ((uint32_t)timerMem % PAGE_SIZE) ; | |||
| timer = (uint32_t *)mmap(timerMem, BLOCK_SIZE, PROT_READ|PROT_WRITE, MAP_SHARED|MAP_FIXED, fd, GPIO_TIMER) ; | |||
| if ((int32_t)timer < 0) | |||
| { | |||
| fprintf (stderr, "wiringPiSetup: mmap failed (timer): %s\n", strerror (errno)) ; | |||
| return -1 ; | |||
| } | |||
| // Set the timer to free-running, 1MHz. | |||
| // 0xF9 is 249, the timer divide is base clock / (divide+1) | |||
| // so base clock is 250MHz / 250 = 1MHz. | |||
| *(timer + TIMER_CONTROL) = 0x0000280 ; | |||
| *(timer + TIMER_PRE_DIV) = 0x00000F9 ; | |||
| timerIrqRaw = timer + TIMER_IRQ_RAW ; | |||
| // Initialise our epoch for millis() | |||
| gettimeofday (&tv, NULL) ; | |||
| epoch = (tv.tv_sec * 1000000 + tv.tv_usec) / 1000 ; | |||
| @@ -759,12 +959,16 @@ int wiringPiSetupGpio (void) | |||
| if (x != 0) | |||
| return x ; | |||
| pinMode = pinModeGpio ; | |||
| pullUpDnControl = pullUpDnControlGpio ; | |||
| digitalWrite = digitalWriteGpio ; | |||
| pwmWrite = pwmWriteGpio ; | |||
| digitalRead = digitalReadGpio ; | |||
| waitForInterrupt = waitForInterruptGpio ; | |||
| pinMode = pinModeGpio ; | |||
| pullUpDnControl = pullUpDnControlGpio ; | |||
| digitalWrite = digitalWriteGpio ; | |||
| pwmWrite = pwmWriteGpio ; | |||
| setPadDrive = setPadDriveGpio ; | |||
| digitalRead = digitalReadGpio ; | |||
| waitForInterrupt = waitForInterruptGpio ; | |||
| delayMicroseconds = delayMicrosecondsWPi ; // Same | |||
| pwmSetMode = pwmSetModeWPi ; | |||
| pwmSetRange = pwmSetRangeWPi ; | |||
| return 0 ; | |||
| } | |||
| @@ -785,12 +989,17 @@ int wiringPiSetupSys (void) | |||
| struct timeval tv ; | |||
| char fName [128] ; | |||
| pinMode = pinModeSys ; | |||
| pullUpDnControl = pullUpDnControlSys ; | |||
| digitalWrite = digitalWriteSys ; | |||
| pwmWrite = pwmWriteSys ; | |||
| digitalRead = digitalReadSys ; | |||
| waitForInterrupt = waitForInterruptSys ; | |||
| pinMode = pinModeSys ; | |||
| pullUpDnControl = pullUpDnControlSys ; | |||
| digitalWrite = digitalWriteSys ; | |||
| pwmWrite = pwmWriteSys ; | |||
| setPadDrive = setPadDriveSys ; | |||
| digitalRead = digitalReadSys ; | |||
| waitForInterrupt = waitForInterruptSys ; | |||
| delayMicroseconds = delayMicrosecondsSys ; | |||
| pwmSetMode = pwmSetModeSys ; | |||
| pwmSetRange = pwmSetRangeSys ; | |||
| // Open and scan the directory, looking for exported GPIOs, and pre-open | |||
| // the 'value' interface to speed things up for later | |||
| @@ -808,51 +1017,3 @@ int wiringPiSetupSys (void) | |||
| return 0 ; | |||
| } | |||
| /* | |||
| * delay: delayMicroseconds | |||
| * Wait for some number of milli/micro seconds | |||
| ********************************************************************************* | |||
| */ | |||
| void delay (unsigned int howLong) | |||
| { | |||
| struct timespec sleeper, dummy ; | |||
| sleeper.tv_sec = (time_t)(howLong / 1000) ; | |||
| sleeper.tv_nsec = (long)(howLong % 1000) * 1000000 ; | |||
| nanosleep (&sleeper, &dummy) ; | |||
| } | |||
| void delayMicroseconds (unsigned int howLong) | |||
| { | |||
| struct timespec sleeper, dummy ; | |||
| sleeper.tv_sec = 0 ; | |||
| sleeper.tv_nsec = (long)(howLong * 1000) ; | |||
| nanosleep (&sleeper, &dummy) ; | |||
| } | |||
| /* | |||
| * millis: | |||
| * Return a number of milliseconds as an unsigned int. | |||
| ********************************************************************************* | |||
| */ | |||
| unsigned int millis (void) | |||
| { | |||
| struct timeval tv ; | |||
| unsigned long long t1 ; | |||
| gettimeofday (&tv, NULL) ; | |||
| t1 = (tv.tv_sec * 1000000 + tv.tv_usec) / 1000 ; | |||
| return (uint32_t)(t1 - epoch) ; | |||
| } | |||
+ 15
- 6
wiringPi/wiringPi.h
Прегледај датотеку
| @@ -41,6 +41,12 @@ | |||
| #define PUD_DOWN 1 | |||
| #define PUD_UP 2 | |||
| // PWM | |||
| #define PWM_MODE_MS 0 | |||
| #define PWM_MODE_BAL 1 | |||
| // Function prototypes | |||
| // c++ wrappers thanks to a commend by Nick Lott | |||
| // (and others on the Raspberry Pi forums) | |||
| @@ -58,11 +64,15 @@ extern int wiringPiSetupPiFace (void) ; | |||
| extern int wiringPiSetupPiFaceForGpioProg (void) ; // Don't use this - for gpio program only | |||
| extern void (*pinMode) (int pin, int mode) ; | |||
| extern void (*pullUpDnControl) (int pin, int pud) ; | |||
| extern void (*digitalWrite) (int pin, int value) ; | |||
| extern void (*pwmWrite) (int pin, int value) ; | |||
| extern int (*digitalRead) (int pin) ; | |||
| extern void (*pinMode) (int pin, int mode) ; | |||
| extern void (*pullUpDnControl) (int pin, int pud) ; | |||
| extern void (*digitalWrite) (int pin, int value) ; | |||
| extern void (*pwmWrite) (int pin, int value) ; | |||
| extern void (*setPadDrive) (int group, int value) ; | |||
| extern int (*digitalRead) (int pin) ; | |||
| extern void (*delayMicroseconds) (unsigned int howLong) ; | |||
| extern void (*pwmSetMode) (int mode) ; | |||
| extern void (*pwmSetRange) (unsigned int range) ; | |||
| // Interrupts | |||
| @@ -84,7 +94,6 @@ extern int piHiPri (int pri) ; | |||
| // Extras from arduino land | |||
| extern void delay (unsigned int howLong) ; | |||
| extern void delayMicroseconds (unsigned int howLong) ; | |||
| extern unsigned int millis (void) ; | |||
| #ifdef __cplusplus | |||
+ 117
- 0
wiringPi/wiringPiSPI.c
Прегледај датотеку
| @@ -0,0 +1,117 @@ | |||
| /* | |||
| * wiringPiSPI.c: | |||
| * Simplified SPI access routines | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| * https://projects.drogon.net/raspberry-pi/wiringpi/ | |||
| * | |||
| * wiringPi is free software: you can redistribute it and/or modify | |||
| * it under the terms of the GNU Lesser General Public License as | |||
| * published by the Free Software Foundation, either version 3 of the | |||
| * License, or (at your option) any later version. | |||
| * | |||
| * wiringPi is distributed in the hope that it will be useful, | |||
| * but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| * GNU Lesser General Public License for more details. | |||
| * | |||
| * You should have received a copy of the GNU Lesser General Public | |||
| * License along with wiringPi. | |||
| * If not, see <http://www.gnu.org/licenses/>. | |||
| *********************************************************************** | |||
| */ | |||
| #include <stdint.h> | |||
| #include <fcntl.h> | |||
| #include <sys/ioctl.h> | |||
| #include <linux/spi/spidev.h> | |||
| #include "wiringPiSPI.h" | |||
| // The SPI bus parameters | |||
| // Variables as they need to be passed as pointers later on | |||
| static char *spiDev0 = "/dev/spidev0.0" ; | |||
| static char *spiDev1 = "/dev/spidev0.1" ; | |||
| static uint8_t spiMode = 0 ; | |||
| static uint8_t spiBPW = 8 ; | |||
| static uint16_t spiDelay = 0; | |||
| static uint32_t spiSpeeds [2] ; | |||
| static int spiFds [2] ; | |||
| /* | |||
| * wiringPiSPIGetFd: | |||
| * Return the file-descriptor for the given channel | |||
| ********************************************************************************* | |||
| */ | |||
| int wiringPiSPIGetFd (int channel) | |||
| { | |||
| return spiFds [channel &1] ; | |||
| } | |||
| /* | |||
| * wiringPiSPIDataRW: | |||
| * Write and Read a block of data over the SPI bus. | |||
| * Note the data ia being read into the transmit buffer, so will | |||
| * overwrite it! | |||
| * This is also a full-duplex operation. | |||
| ********************************************************************************* | |||
| */ | |||
| int wiringPiSPIDataRW (int channel, unsigned char *data, int len) | |||
| { | |||
| struct spi_ioc_transfer spi ; | |||
| channel &= 1 ; | |||
| spi.tx_buf = (unsigned long)data ; | |||
| spi.rx_buf = (unsigned long)data ; | |||
| spi.len = len ; | |||
| spi.delay_usecs = spiDelay ; | |||
| spi.speed_hz = spiSpeeds [channel] ; | |||
| spi.bits_per_word = spiBPW ; | |||
| return ioctl (spiFds [channel], SPI_IOC_MESSAGE(1), &spi) ; | |||
| } | |||
| /* | |||
| * wiringPiSPISetup: | |||
| * Open the SPI device, and set it up, etc. | |||
| ********************************************************************************* | |||
| */ | |||
| int wiringPiSPISetup (int channel, int speed) | |||
| { | |||
| int fd ; | |||
| channel &= 1 ; | |||
| if ((fd = open (channel == 0 ? spiDev0 : spiDev1, O_RDWR)) < 0) | |||
| return -1 ; | |||
| spiSpeeds [channel] = speed ; | |||
| spiFds [channel] = fd ; | |||
| // Set SPI parameters. | |||
| // Why are we reading it afterwriting it? I've no idea, but for now I'm blindly | |||
| // copying example code I've seen online... | |||
| if (ioctl (fd, SPI_IOC_WR_MODE, &spiMode) < 0) return -1 ; | |||
| if (ioctl (fd, SPI_IOC_RD_MODE, &spiMode) < 0) return -1 ; | |||
| if (ioctl (fd, SPI_IOC_WR_BITS_PER_WORD, &spiBPW) < 0) return -1 ; | |||
| if (ioctl (fd, SPI_IOC_RD_BITS_PER_WORD, &spiBPW) < 0) return -1 ; | |||
| if (ioctl (fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed) < 0) return -1 ; | |||
| if (ioctl (fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed) < 0) return -1 ; | |||
| return fd ; | |||
| } | |||
+ 35
- 0
wiringPi/wiringPiSPI.h
Прегледај датотеку
| @@ -0,0 +1,35 @@ | |||
| /* | |||
| * wiringPiSPI.h: | |||
| * Simplified SPI access routines | |||
| * Copyright (c) 2012 Gordon Henderson | |||
| *********************************************************************** | |||
| * This file is part of wiringPi: | |||
| * https://projects.drogon.net/raspberry-pi/wiringpi/ | |||
| * | |||
| * wiringPi is free software: you can redistribute it and/or modify | |||
| * it under the terms of the GNU Lesser General Public License as | |||
| * published by the Free Software Foundation, either version 3 of the | |||
| * License, or (at your option) any later version. | |||
| * | |||
| * wiringPi is distributed in the hope that it will be useful, | |||
| * but WITHOUT ANY WARRANTY; without even the implied warranty of | |||
| * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | |||
| * GNU Lesser General Public License for more details. | |||
| * | |||
| * You should have received a copy of the GNU Lesser General Public | |||
| * License along with wiringPi. | |||
| * If not, see <http://www.gnu.org/licenses/>. | |||
| *********************************************************************** | |||
| */ | |||
| #ifdef __cplusplus | |||
| extern "C" { | |||
| #endif | |||
| int wiringPiSPIGetFd (int channel) ; | |||
| int wiringPiSPIDataRW (int channel, unsigned char *data, int len) ; | |||
| int wiringPiSPISetup (int channel, int speed) ; | |||
| #ifdef __cplusplus | |||
| } | |||
| #endif | |||
+ 25
- 19
wiringPi/wiringSerial.c
Прегледај датотеку
| @@ -20,8 +20,6 @@ | |||
| *********************************************************************** | |||
| */ | |||
| #undef DEBUG | |||
| #include <stdio.h> | |||
| #include <stdlib.h> | |||
| #include <stdint.h> | |||
| @@ -49,10 +47,6 @@ int serialOpen (char *device, int baud) | |||
| speed_t myBaud ; | |||
| int status, fd ; | |||
| #ifdef DEBUG | |||
| printf ("openSerialPort: <%s> baud: $d\n", device, baud) ; | |||
| #endif | |||
| switch (baud) | |||
| { | |||
| case 50: myBaud = B50 ; break ; | |||
| @@ -86,22 +80,22 @@ int serialOpen (char *device, int baud) | |||
| tcgetattr (fd, &options) ; | |||
| cfmakeraw (&options) ; | |||
| cfsetispeed (&options, myBaud) ; | |||
| cfsetospeed (&options, myBaud) ; | |||
| cfmakeraw (&options) ; | |||
| cfsetispeed (&options, myBaud) ; | |||
| cfsetospeed (&options, myBaud) ; | |||
| options.c_cflag |= (CLOCAL | CREAD) ; | |||
| options.c_cflag &= ~PARENB ; | |||
| options.c_cflag &= ~CSTOPB ; | |||
| options.c_cflag &= ~CSIZE ; | |||
| options.c_cflag |= CS8 ; | |||
| options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG) ; | |||
| options.c_oflag &= ~OPOST ; | |||
| options.c_cflag |= (CLOCAL | CREAD) ; | |||
| options.c_cflag &= ~PARENB ; | |||
| options.c_cflag &= ~CSTOPB ; | |||
| options.c_cflag &= ~CSIZE ; | |||
| options.c_cflag |= CS8 ; | |||
| options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG) ; | |||
| options.c_oflag &= ~OPOST ; | |||
| options.c_cc [VMIN] = 0 ; | |||
| options.c_cc [VTIME] = 100 ; // Ten seconds (100 deciseconds) | |||
| options.c_cc [VMIN] = 0 ; | |||
| options.c_cc [VTIME] = 100 ; // Ten seconds (100 deciseconds) | |||
| tcsetattr (fd, TCSANOW, &options) ; | |||
| tcsetattr (fd, TCSANOW | TCSAFLUSH, &options) ; | |||
| ioctl (fd, TIOCMGET, &status); | |||
| @@ -117,6 +111,18 @@ int serialOpen (char *device, int baud) | |||
| /* | |||
| * serialFlush: | |||
| * Flush the serial buffers (both tx & rx) | |||
| ********************************************************************************* | |||
| */ | |||
| void serialFlush (int fd) | |||
| { | |||
| tcflush (fd, TCIOFLUSH) ; | |||
| } | |||
| /* | |||
| * serialClose: | |||
| * Release the serial port | |||
| ********************************************************************************* | |||
+ 1
- 0
wiringPi/wiringSerial.h
Прегледај датотеку
| @@ -26,6 +26,7 @@ extern "C" { | |||
| extern int serialOpen (char *device, int baud) ; | |||
| extern void serialClose (int fd) ; | |||
| extern void serialFlush (int fd) ; | |||
| extern void serialPutchar (int fd, unsigned char c) ; | |||
| extern void serialPuts (int fd, char *s) ; | |||
| extern void serialPrintf (int fd, char *message, ...) ; | |||